[お掃除ロボットを作る 06]壁際を走行

Takahiko Wada
イケてる機能が追加されました。
「壁際掃除機能」です。
センサで壁との距離を測りながら、壁に沿って走行します。
これから壁際掃除ブラシを装着する予定。それがあれば、際まで掃除出来るはず。
ここからは技術的なハナシ。。。
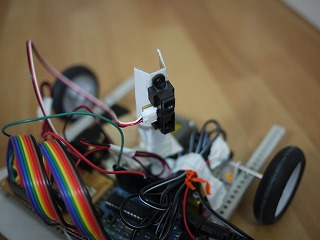
壁際走行では、赤外線距離センサで壁との距離を測り、
その距離が目標値(今は13cm)で安定するように、PID制御でコントロールしています。
PID制御とか、なんか、専門的な響きです。。。
古くからある制御理論ですが、未だに産業界のほとんどは、PIDで制御されてるらしいです。
いちお大学では制御工学やってたのですが、ここに来て微妙に役に立ちました。てか、ようやく理解しました。
今回は以下のサイトを参考にして作りました。
赤外線距離センサについて
▼なんでも作っちゃう、かも。 Arduinoで遊ぼう - 赤外線距離センサ(GP2Y0A21YK0F):
PID制御について
▼Arduino playground - BarebonesPIDForEspresso:
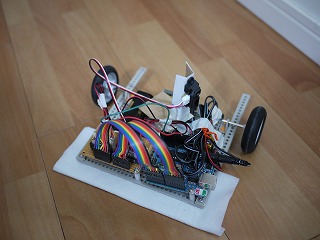
とりあえず前方に、クイックルワイパーを付けてます。
前回より配線とかが、しっかりしてきました。まだゴチャゴチャしてますが、、、
上にニョキッと出てるのが、赤外線距離センサ。シャープ製GP2Y0A21YK0F、750円です。